Field-oriented control of PMSM
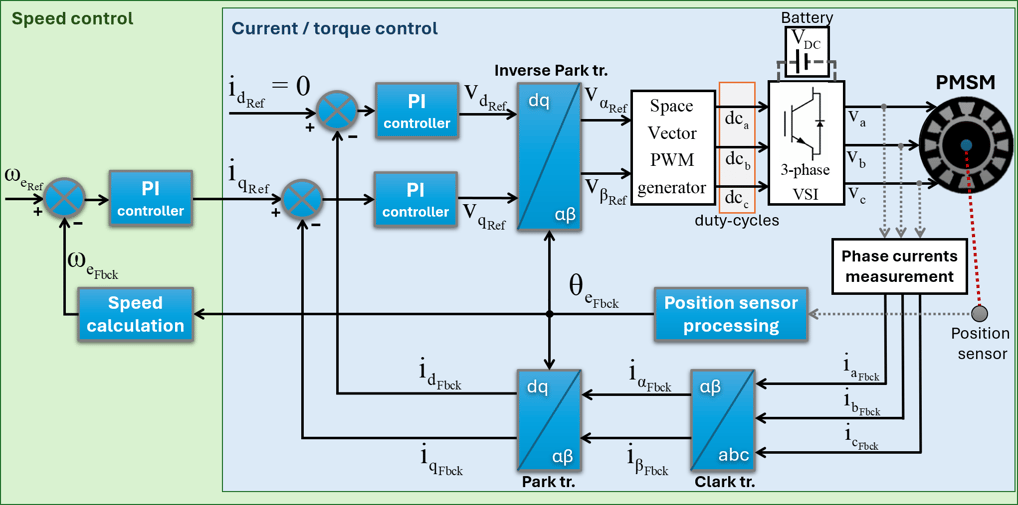
Figure 1.: Block diagram of field-oriented control of PMSM
Field-oriented control (FOC) is effective and high performance technique to control AC motors. Due to expansion of the use of microcontrollers and due to constantly increasing its computing power FOC becomes a common part of motor control algorithms in majority of such applications. Therefore, FOC is currently one of the most common control technique of Permanent Magnet Synchronous Motor (PMSM), and it has several important benefits:
high efficiency and optimal performance
low noise and low vibrations
high torque during all speeds (including zero speed and start-up) and all operation points
possibility for lot of improvements like MTPA, field-weakening or sensorless control
Field-oriented control utilize transformation of three-phase stator currents of the AC motor (like PMSM or ASM), into two virtual components d and q, using Clark and Park transformations. Flux-producing component is represented by d-axis current of the stator current and the torque-producing component is represented by q-axis current of the stator current. After transformation of stator current from stationary abc reference frame into virtual rotating dq reference frame it is possible to control both dq currents independently via PI controllers, and thus it is possible to control torque and flux independently. This separation is significantly simplifying control of PMSM and allows to utilize advanced algorithms like field-weakening or MTPA. Stator current amplitude consisting of dq currents creating stator current vector is then defined as follows:
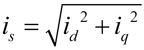
Following equation for electromagnetic torque of PMSM describes how synchronous torque (left inner part of equation) and reluctance torque (right inner part of equation) are produced through independent dq currents and how they interact into final value of produced electromagnetic torque:
Biggest electromagnetic torque and most optimal control is achieved when the angle between flux of permanent magnets and stator current vector is exactly 90 degrees. Therefore, during normal operation, whole stator current should be placed into q-axis while d-axis current should stay 0. Exception to this is for example technique Maximum Torque Per Ampere, where reluctance torque is utilized too or field-weakening technique, where d-axis current is used to achieve higher speeds.
Independent control of dq currents is possible via two PI controllers as shown in figure 1, where block diagram of field-oriented control of PMSM is presented. Current / torque control loop could be extended with speed control via speed PI controller if necessary.
References:
R. Gabriel, W. Leonhard and C. J. Nordby, "Field-Oriented Control of a Standard AC Motor Using Microprocessors"
S. Chi, Z. Zhang and L. Xu, "Sliding-Mode Sensorless Control of Direct-Drive PM Synchronous Motors for Washing Machine Applications"
P. Mattavelli, L. Tubiana and M. Zigliotto, "Torque-ripple reduction in PM synchronous motor drives using repetitive current control"